ROBO Pro Coding I²C Blöcke von fischertechnik GitLab: ft_Controller_I2C
I²C Module | I²C Hardware, Software | I²C Quellcodedateien, Blöcke
I²C Programmierbeispiele im Überblick
qwiicmotor_joystick (I²C Motor Driver mit I²C Joystick steuern)

Mit zwei I²C Modulen ‘SparkFun Qwiic Motor Driver’ lassen sich vier (zusätzliche) Motoren steuern. Oder wie beim Kran drei Motoren und ein Elektromagnet. Nichts ist einfacher, als diese Motoren mit dem I²C Joystick zu steuern. Mit Drücken auf den Joystick wird der Motor Chip gewechselt. Mit Bewegung in X oder Y Richtung wird jeweils einer der zwei Motoren an einem Motor Modul gesteuert, oder beide Motoren gleichzeitig.
Block joy_2motoren
- Quellcodedateien: i2cCode, qwiicjoystick, qwiicmotor, qwiicmotor_joystick
- I²C Module: I²C Motor Driver, I²C Joystick
- Laden von fischertechnik GitLab: I2C_Motoren_Joystick

Zum Vergrößern auf das Bild klicken.
- Verwendet nur ein I²C Motor Modul (für 2 Motoren) und den Joystick.
- Drücken auf Joystick schaltet Motor Power an und aus.
- Mit dem Joystick werden beide Motoren in dauerhaft Schleife gesteuert.
- Quellcodedateien: i2cCode, qwiicjoystick, qwiicmotor, qwiicmotor_joystick
- I²C Module: 2 Stück I²C Motor Driver, I²C Joystick
- Laden von fischertechnik GitLab: I2C_Motoren_Joystick

Zum Vergrößern auf das Bild klicken.
- Verwendet zwei I²C Motor Module (für 4 Motoren) und den Joystick.
- Beim zweiten Modul wurde die I²C-Adresse geändert (Lötbrücke).
- (Es sind 10 I²C-Adressen möglich, also 20 Motoren an einem I²C-Bus…)
- Drücken auf Joystick schaltet I²C-Adresse und Motor Power zwischen den Motor-Modulen um.
- Mit dem Joystick werden die aktiven Motoren in dauerhaft Schleife gesteuert.
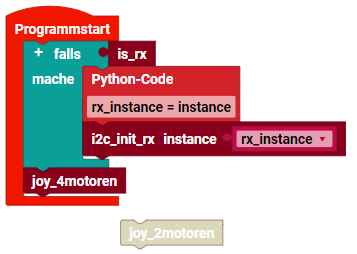
Beim RX Controller muss I²C beim Programmstart initialisiert werden.